Ten artykuł wyjaśnia kluczowe różnice między silnikiem krokowym a serwosilnikiem, pomagając Ci wybrać najlepsze rozwiązanie do swojej aplikacji. Omówimy ich zasadę działania, budowę, pobór prądu oraz najważniejsze cechy. Dowiesz się, jakie pytania warto sobie zadać przed podjęciem decyzji i poznasz konkretne przykłady zastosowań.
Dzięki tej wiedzy wybierzesz silnik idealnie dopasowany do Twoich potrzeb.
Jak działa silnik krokowy
Budowa silnika krokowego
Większość silników krokowych stosowanych w przemyśle to modele hybrydowe, łączące wirnik z magnesami trwałymi oraz uzwojony stojan elektromagnetyczny. Istnieje kilka typów silników krokowych, a każdy z nich ma unikalne właściwości i zastosowania.
Silniki krokowe to elektryczne silniki bez komutatorów, w których wszystkie uzwojenia znajdują się w stojanie. Wirnik może być magnesem trwałym lub – w przypadku silników o zmiennej reluktancji – zębastym blokiem z magnetycznie miękkiego materiału. Za komutację odpowiada zewnętrzny sterownik (driver), który precyzyjnie kontroluje ruch silnika, pozwalając na jego obrót w obu kierunkach oraz utrzymanie go w stałej pozycji.

Schemat 1. Przekrój silnika krokowego
Silniki bipolarne z magnesami trwałymi oraz hybrydowe opierają się na dwóch uzwojeniach. Poniższy schemat przedstawia ich sposób okablowania oraz przekrój poprzeczny.

Schemat 2. Silnik bipolarny
Prąd dostarczany z napędu tworzy pole magnetyczne, które jest używane do obracania wału silnika. Poniżej znajduje się graficzna reprezentacja tego, jak działa ten proces.

Schemat 3. Silnik bipolarny – proces działania
Opis procesu działania
- Górny elektromagnes zostaje aktywowany, a zęby środkowego koła zębatego ustawiają się w jednej linii z nim.
- Następnie górny elektromagnes wyłącza się, a prawy się włącza. Zęby koła zębatego przesuwają się, dopasowując do nowej pozycji, co powoduje krok (np. obrót o 1,8°).
- Gdy prawy elektromagnes się wyłącza, aktywuje się dolny. Zęby ponownie przeskakują, ustawiając się w jednej linii, wykonując kolejny krok.
- Dolny elektromagnes zostaje dezaktywowany, a włącza się lewy. Koło zębate kontynuuje ruch, ustawiając się w nowej pozycji i wykonując kolejny krok. W silniku o kącie kroku 1,8° potrzeba 200 kroków, aby wykonać pełny obrót.
Kluczowe zasady działania silnika krokowego
- Mikrokrok zwiększa liczbę kroków na obrót, poprawiając precyzję ruchu.
- Wyższy prąd zwiększa moment obrotowy silnika.
- Im większa częstotliwość kroków, tym wyższa prędkość obrotowa.
- Przy wyższych prędkościach siła elektromotoryczna zwrotna (Back EMF) może obniżać moment obrotowy.
- Sprzężenie zwrotne położenia nie jest wymagane, ale można je zastosować opcjonalnie.
Podsumowanie: Jak działa silnik krokowy?
Silnik krokowy wykorzystuje prąd stały do generowania pola magnetycznego, sterującego ruchem wirnika. Pracuje w otwartym układzie sterowania (bez obowiązkowego sprzężenia zwrotnego). Prąd jest podtrzymywany nawet wtedy, gdy silnik pozostaje w stanie spoczynku.
Zalety silnika krokowego
 Prosta konstrukcja i łatwe sterowanie
Prosta konstrukcja i łatwe sterowanie
Brak konieczności stosowania sprzężenia zwrotnego (opcjonalne)
Wysoki moment obrotowy przy niskich prędkościach
Płynny ruch przy niskich prędkościach
Niższy całkowity koszt systemu
Ograniczenia silnika krokowego
 Moment obrotowy maleje wraz ze wzrostem prędkości
Moment obrotowy maleje wraz ze wzrostem prędkości
Stały pobór prądu niezależnie od obciążenia
Brak reakcji na zmienne obciążenie
Jak działa serwosilnik?
Budowa serwosilnika
Serwosilnik AC składa się z trójfazowego stojana oraz wirnika wyposażonego w magnesy trwałe. Do precyzyjnego sterowania prądem niezbędne jest sprzężenie zwrotne, które zapewnia resolver lub enkoder. Dzięki temu układ może monitorować pozycję wirnika i dostosowywać działanie silnika w czasie rzeczywistym.
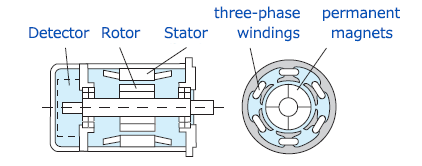
Schemat 4. Budowa serwosilnika
Serwosilnik wykorzystuje trójfazowy prąd przemienny do zasilania cewek magnetycznych, co zapewnia płynne i precyzyjne sterowanie jego pracą.
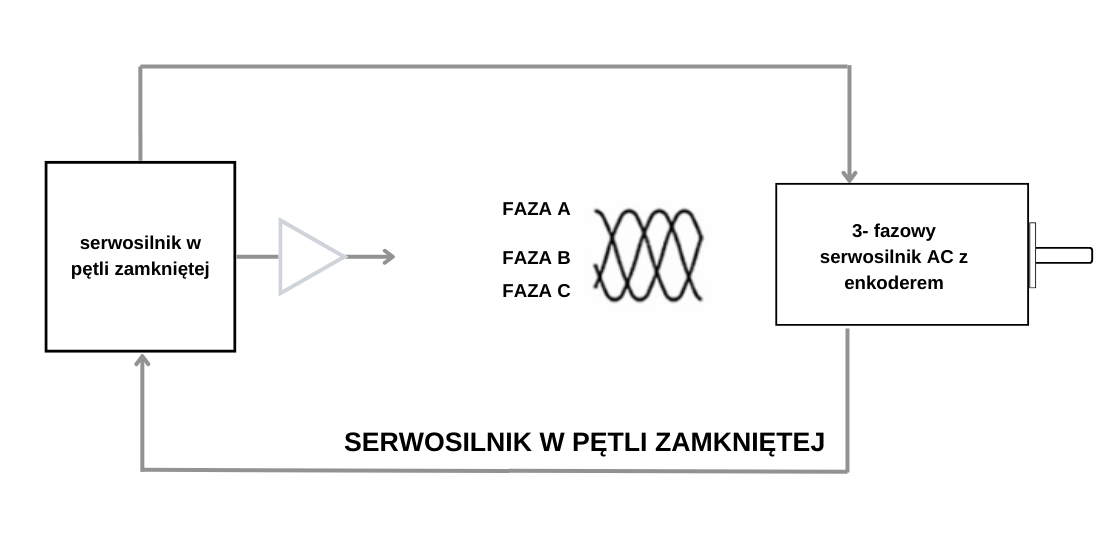
Schemat 5. Serwosilnik w pętli zamkniętej
Zmiana prądu w stojanie powoduje zmianę pola magnetycznego trzech faz, co sprawia, że magnesy trwałe wirnika synchronizują się z odpowiednią fazą.
Kluczowe zasady działania serwosilnika
- Wyższy prąd zwiększa moment obrotowy silnika.
- Im większa częstotliwość prądu, tym szybciej obraca się silnik.
- Serwosilnik monitoruje i reguluje prąd, zapewniając precyzyjną kontrolę momentu obrotowego.
- Sprzężenie zwrotne jest niezbędne do prawidłowego sterowania prądem.
Podsumowanie: Jak działa serwosilnik?
Serwosilnik wykorzystuje trójfazowy prąd przemienny (AC) do generowania pola magnetycznego. Pracuje w układzie pętli zamkniętej, co oznacza, że stale monitoruje swoje położenie względem zadanej pozycji i dynamicznie dostosowuje prąd, aby zapewnić maksymalną precyzję.
Zalety serwosilnika
Sterowanie w pętli zamkniętej zapewnia wysoką precyzję Wyższy moment obrotowy przy dużych prędkościach Mniejsze nagrzewanie się silnika podczas pracy Lepsze dopasowanie do systemów o zmiennym obciążeniu
Ograniczenia serwosilnika
Bardziej złożona kontrola – konieczne dostrajanie systemu Wymagane sprzężenie zwrotne położenia Wyższy koszt całkowity systemu
Silnik krokowy czy serwosilnik? Jak wybrać odpowiedni napęd?
Kluczowe pytania przy wyborze silnika
- Jakie obciążenie musi być przemieszczane?
- Jaką prędkość należy osiągnąć?
- Czy obciążenie zmienia się w trakcie ruchu?
- Czy wymagane są dodatkowe funkcje, np. moment trzymający lub ograniczenie momentu obrotowego?
- Jaki budżet jest dostępny na system napędowy?
- Który typ silnika najlepiej sprawdzi się lepiej w konkretnej aplikacji?
Odpowiedzi na kluczowe pytania dotyczące wyboru silnika
1.Jakie obciążenie musi być przemieszczane?
Kiedy wybieramy silnik do danego zastosowania, musimy wiedzieć, jaki moment obrotowy może on dostarczyć. W tym celu używamy krzywej momentu obrotowego silnika. Oto typowa krzywa momentu obrotowego serwosilnika.

2. Jaką prędkość należy osiągnąć? (MOMENT OBROTOWY + PRĘDKOŚĆ)
Często zakłada się, że silniki serwo są lepsze od silników krokowych o podobnych rozmiarach. Jednak często tak nie jest. Oto wykres momentu obrotowego silnika krokowego o podobnych rozmiarach w porównaniu z wykresem momentu obrotowego serwa.
Przy dużych prędkościach moment obrotowy silnika krokowego zbliża się do zera, natomiast serwosilnik zapewnia stały moment obrotowy w całym zakresie prędkości.

3. Czy obciążenie zmienia się w trakcie ruchu?
Serwosilniki mają zdolność do krótkotrwałego dostarczania szczytowego momentu obrotowego, co pozwala im kompensować wahania obciążenia oraz radzić sobie z dynamicznymi przyspieszeniami i opóźnieniami.

Specjalne funkcje: Moment trzymający
Silniki krokowe mogą utrzymać pełny moment obrotowy w stanie spoczynku, o ile uzwojenia są zasilane. Dzięki temu mogą stabilnie utrzymywać obciążenie w miejscu, nawet w przypadku działania sił zewnętrznych. Ta właściwość sprawia, że są idealnym wyborem w aplikacjach wymagających precyzyjnego pozycjonowania.
4. Czy wymagane są dodatkowe funkcje, np. moment trzymający lub ograniczenie momentu obrotowego?
Serwosilniki oferują zaawansowaną kontrolę momentu obrotowego poprzez precyzyjne monitorowanie prądu. Dzięki temu mogą dynamicznie ograniczać moment, zapewniając stabilność i precyzję w aplikacjach wymagających delikatnych nacisków, ciągnięcia czy skręcania.
5.Jaki budżet? Koszt systemu napędowgo.
Silniki krokowe
- zazwyczaj nie wymagają sprzężenia zwrotnego,
- wykorzystują tańsze magnesy i rzadko zawierają przekładnie.
- ze względu na dużą liczbę biegunów i zdolność do generowania momentu trzymającego zużywają mniej energii przy zerowej prędkości.
- w rezultacie silnik krokowy jest ogólnie tańszy niż porównywalny silnik serwo.
Serwosilnik
- wymagają sprzężenia zwrotnego,
- wykorzystują droższe magnesy.
- pobierają również więcej mocy przy zerowej prędkości. W rezultacie silnik serwo jest zazwyczaj droższy niż porównywalny silnik krokowy.
6.Który typ silnika najlepiej sprawdzi się w konkretnej aplikacji?
Podstawową różnicą między tymi silnikami jest sposób sterowania:
- Silnik krokowy działa w układzie pętli otwartej – nie wymaga sprzężenia zwrotnego, ale nie może kompensować zmian obciążenia.
- Serwosilnik wykorzystuje układ pętli zamkniętej – stale monitoruje położenie i moment obrotowy, dynamicznie dostosowując parametry pracy.

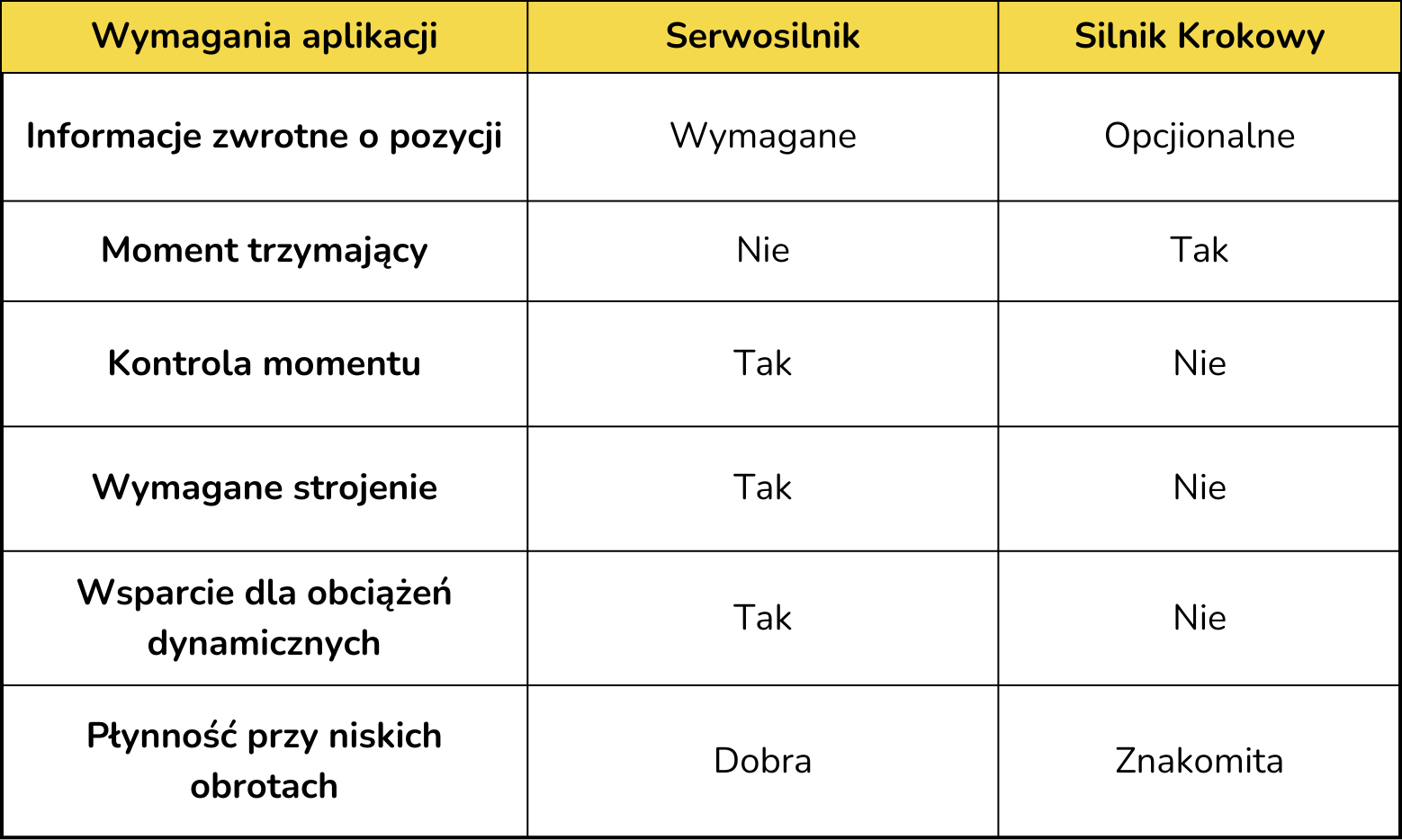
Wybór odpowiedniego silnika zależy od specyfiki zastosowania. Aby ułatwić decyzję, warto przeanalizować wymagania systemu i porównać kluczowe parametry w poniższej tabeli.
Kiedy wybrać serwosilnik?
Serwosilnik sprawdzi się w aplikacjach, które wymagają:
- Dużej prędkości obrotowej
- Dynamicznych profili ruchu – zmienne przyspieszenia i obciążenia
- Precyzyjnej kontroli momentu obrotowego
Zalety serwosilnika
Zaawansowana kontrola momentu obrotowego – dostosowanie do zmiennego obciążenia Możliwość wykonywania skomplikowanych ruchów – elastyczność sterowania Automatyczna adaptacja do zmian obciążenia – płynna i stabilna praca Mniejsze zużycie energii – wyższa efektywność energetyczna
Przykłady zastosowania – Serwosilnik
 tam gdzie potrzebna jest dynamiczna kontrola momentu i pozycji
tam gdzie potrzebna jest dynamiczna kontrola momentu i pozycji
Cel – Producent OEM linii napełniających i butelkujących potrzebuje siłownika liniowego i obrotowego do precyzyjnego podawania oraz zakręcania. Kluczowym wymaganiem jest dokładne umieszczanie zakrętki oraz zgłaszanie brakujących lub źle założonych elementów.
Wymagania aplikacji:
- Integracja z istniejącym sterowaniem PLC
- Bardzo wysoka przepustowość
- Ograniczenie momentu obrotowego podczas zakręcania
- Obsługa wielu rodzajów produktów
Kiedy wybrać silnik krokowy?
Silnik krokowy będzie najlepszym wyborem, jeśli aplikacja wymaga:
- Wysokiego momentu obrotowego
- Niskiej prędkości pracy
- Krótkich, szybkich i powtarzalnych ruchów
- Prostego sterowania
- Precyzyjnego pozycjonowania przy niskiej prędkości
Zalety silnika krokowego
Solidna konstrukcja – odporna na zużycie i awarie Wysoka niezawodność – brak konieczności konserwacji Brak potrzeby dostrajania – system działa od razu po wdrożeniu Niższy koszt całego układu – ekonomiczne rozwiązanie
Przykłady zastosowań – Silnik krokowy
Automatyczne ruchy ustawcze
Nasz Cel – Producent maszyny dąży do automatyzacji konfiguracji rolek, aby:
- Skrócić czas przezbrajania
- Zwiększyć powtarzalność ustawień dla różnych konfiguracji produkcyjnych
Wymagania aplikacji:
- Integracja z istniejącym sterownikiem PLC
- Czas cyklu poniżej 1 minuty
- Możliwość regulacji pozycji na żądanie
- Monitorowanie pozycji w czasie rzeczywistym
- Utrzymanie pozycji w stanie spoczynku
Tekst opracował:
Andrzej Łacinnik
mgr inż. / MSCEE
Inżynier Aplikacyjny
____________________________________
Nasze rozwiązania: